Základní postup pro nastavení M400 a lidaru Zenmuse L2.
Nastavení v aplikaci DJI Pilot 2
Po spuštění aplikace Pilot 2 a připojení k dronu M400 vstupte do menu nastavení (tři tečky v pravo nahoře)
Ověřte funkčnost stanice RTK viz článek pro její základní nastavení.
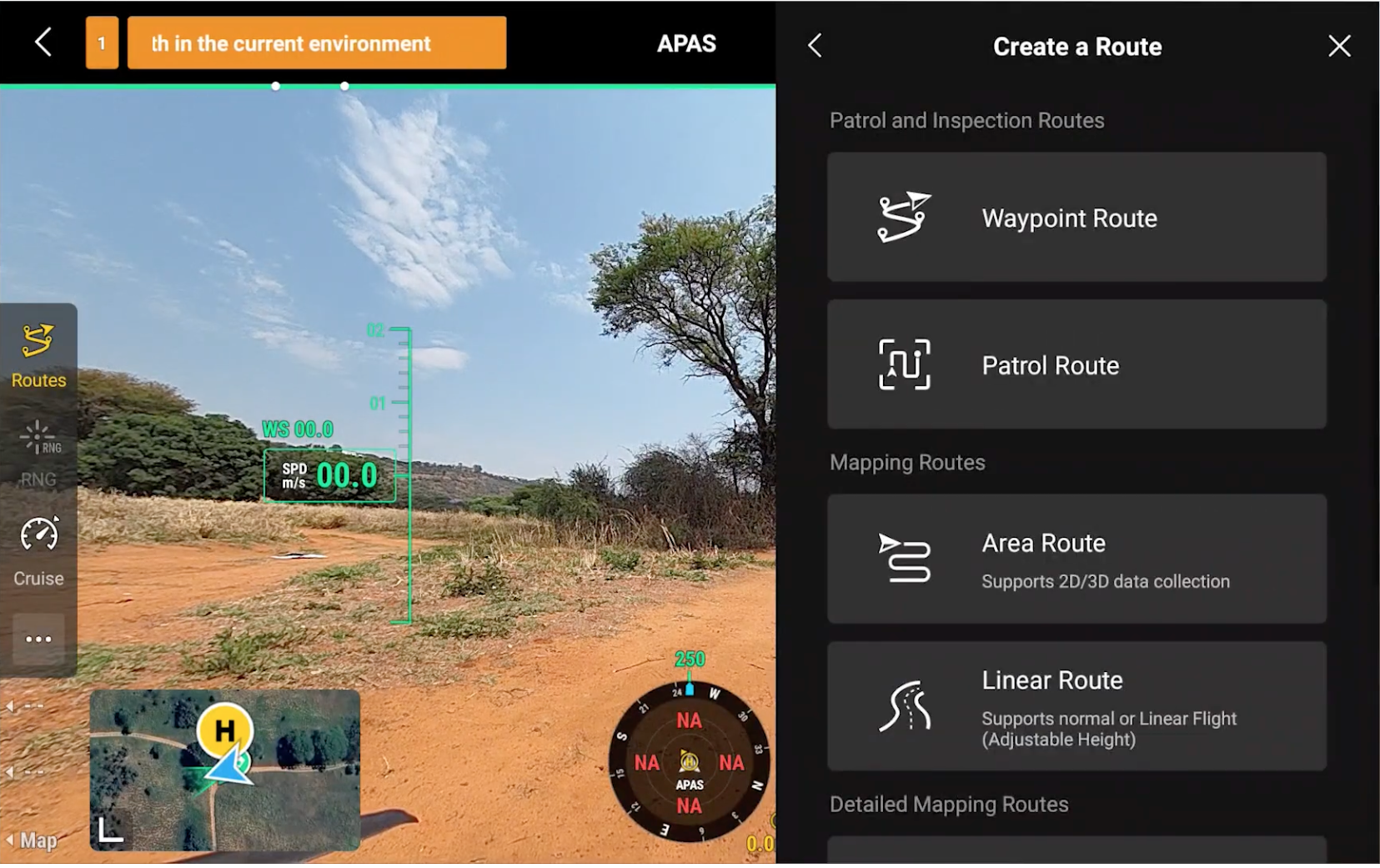
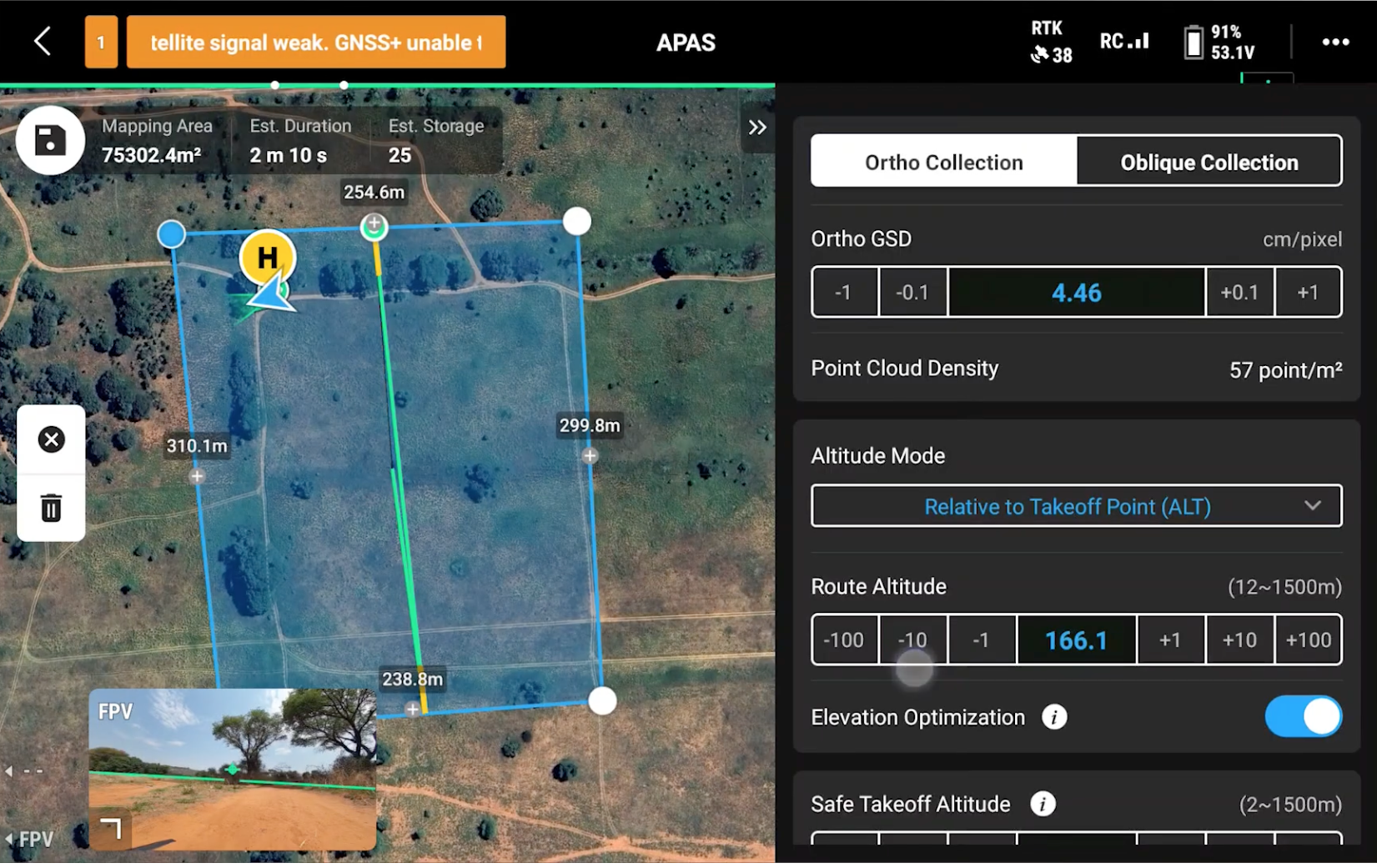
Pro nastavení lidaru začneme vytvořením mise pro snímání plochy - Area Route.
Vytvoříme ohraničení plochy a kliknutím na jeden z bodů vytvořené ho polygonu se otevře panel pro nastavení. Vybereme model dronu (M400), kamery (Zenmuse L2) a typ snímání - Lidar mapping
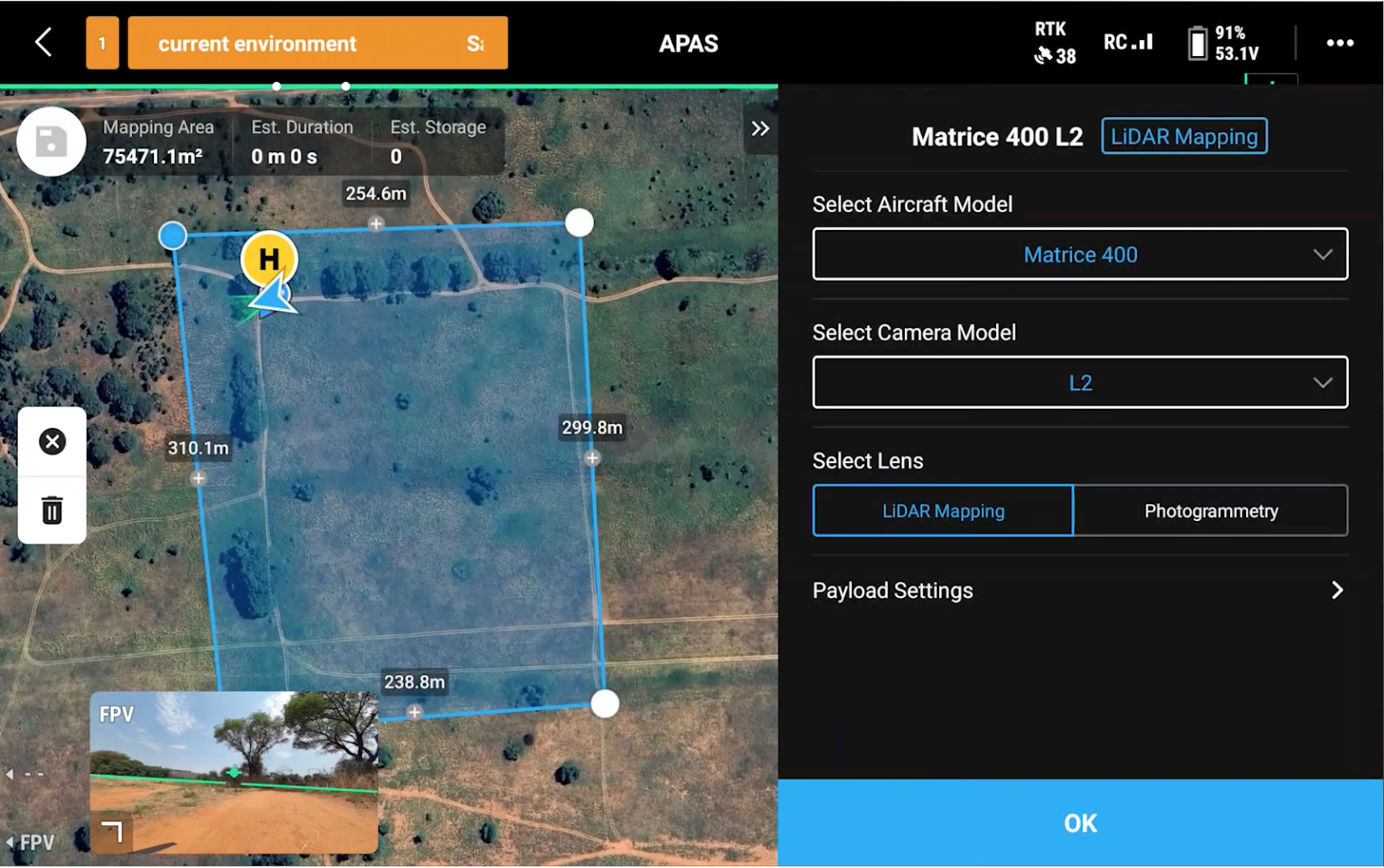
Ve stejném panelu klikneme na Payload Settings.
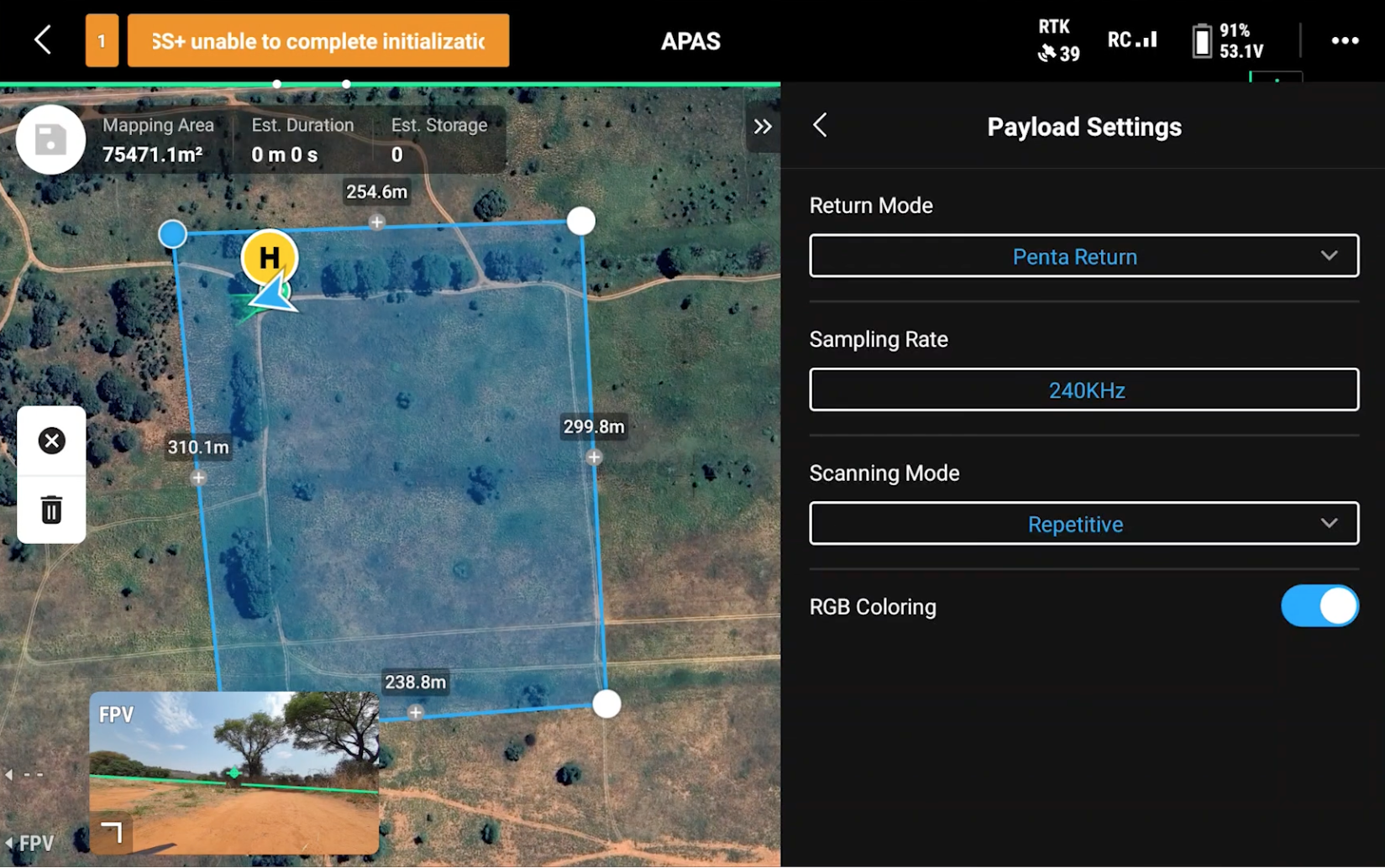
Zde je podrobný přehled hlavních nastavení:
1. Return Mode (Režim návratu)
Tento parametr určuje, kolikrát se laserový paprsek odrazí a vrátí zpět do senzoru ze jednoho výstřelu.
- Možnosti: Single (nejsilnější), Dual, Triple, Quad, Penta (až 5 návratů).
- Použití:
- Single Return: Vhodné pro otevřené plochy, holou zem, kde není vegetace (max. 240 000 bodů/s).
- Triple/Quad/Penta Return: Ideální pro lesnictví, hustou vegetaci nebo urbanizované oblasti s dráty el. vedení. Více návratů umožňuje "proniknout" skrz větve a získat body z podrostu (až 1 200 000 bodů/s v režimu vícenásobných návratů).
- Doporučení: Pro většinu projektů s vegetací se doporučuje minimálně Triple nebo Penta, aby se zajistilo dostatečné pokrytí podrostu.
2. Scanning Mode (Režim skenování)
Zenmuse L2 nabízí dva režimy pro vykreslování bodového mračna.
- Repetitive Scanning (Opakované skenování):
- Laser skenuje v užším pruhu, ale řádkování je pravidelné a přesné.
- Použití: Nejlepší pro přesné inženýrské geodézie, tvorbu DEM (digitální model terénu) a místa, kde je potřeba vysoká hustota bodů a rovnoměrnost.
- Non-repetitive Scanning (Neopakované skenování):
- Laser pokrývá větší oblast (FOV 70° x 75°) a body se v čase neopakují, což vytváří "cípovitý" vzor.
- Použití: Ideální pro inspekci el. vedení, lesnictví nebo rozsáhlé mapování, kde je potřeba proniknout skrze vegetaci ze všech směrů.
3. Sampling Rate / Point Cloud Rate (Vzorkovací frekvence)
Tento parametr definuje hustotu dat. Zenmuse L2 má maximální rychlost emise laserových pulzů 240 kHz, což platí pro všechny režimy návratů.
- Rychlost: 240 000 bodů/s (Single) až 1 200 000 bodů/s (Multi-return).
- Poznámka: Na rozdíl od L1, kde se frekvence měnila podle počtu návratů, L2 si drží vysoký výkon i při vícenásobných návratech.
Doporučené nastavení dle scénáře (Best Practices)
| Scénář | Return Mode | Scan Mode | Rychlost letu |
|---|---|---|---|
| Otevřená plocha (Topografie) | Dual | Repetitive | 10-15 m/s |
| Hustý les / Vegetace | Penta | Non-repetitive | 5-7 m/s |
| Inspekce vedení (Powerline) | Triple/Quad | Non-repetitive | 7-10 m/s |
| Urbanizovaná oblast | Triple | Repetitive | 8-12 m/s |
- RGB Coloring: Doporučuje se nechat zapnuté pro barevné bodové mračno (vyžaduje denní světlo).
- Altitude (Výška): Doporučená výška je 30-150 m, pro vysokou přesnost se obvykle volí 50-80 m.
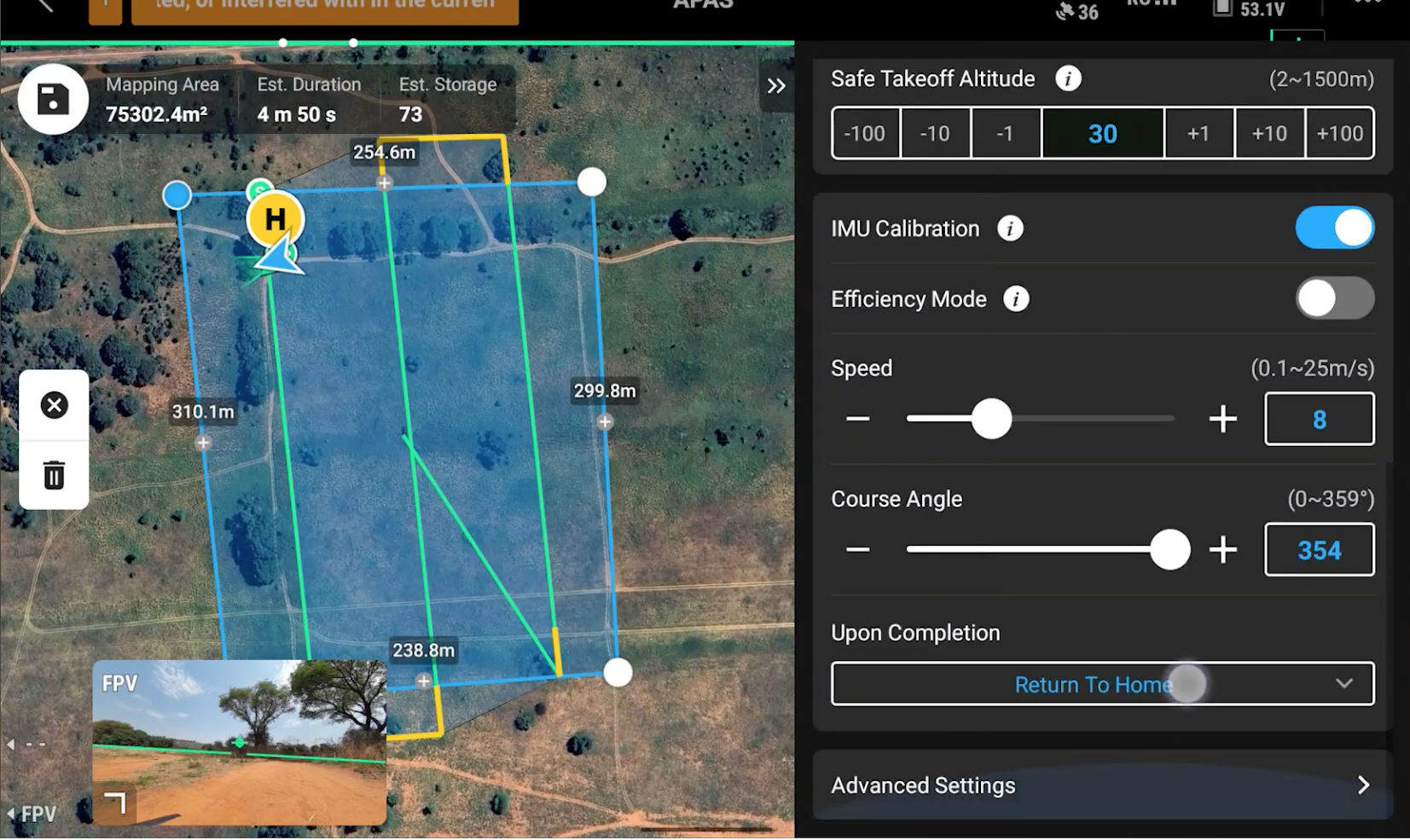
- IMU Calibration: Vždy povolit kalibraci IMU před misí.
Klikneme na OK a nastavíme další parametry, zejména výšku letu (Route Altitude např. 80m), Rychlost (Speed např. 8m/s)
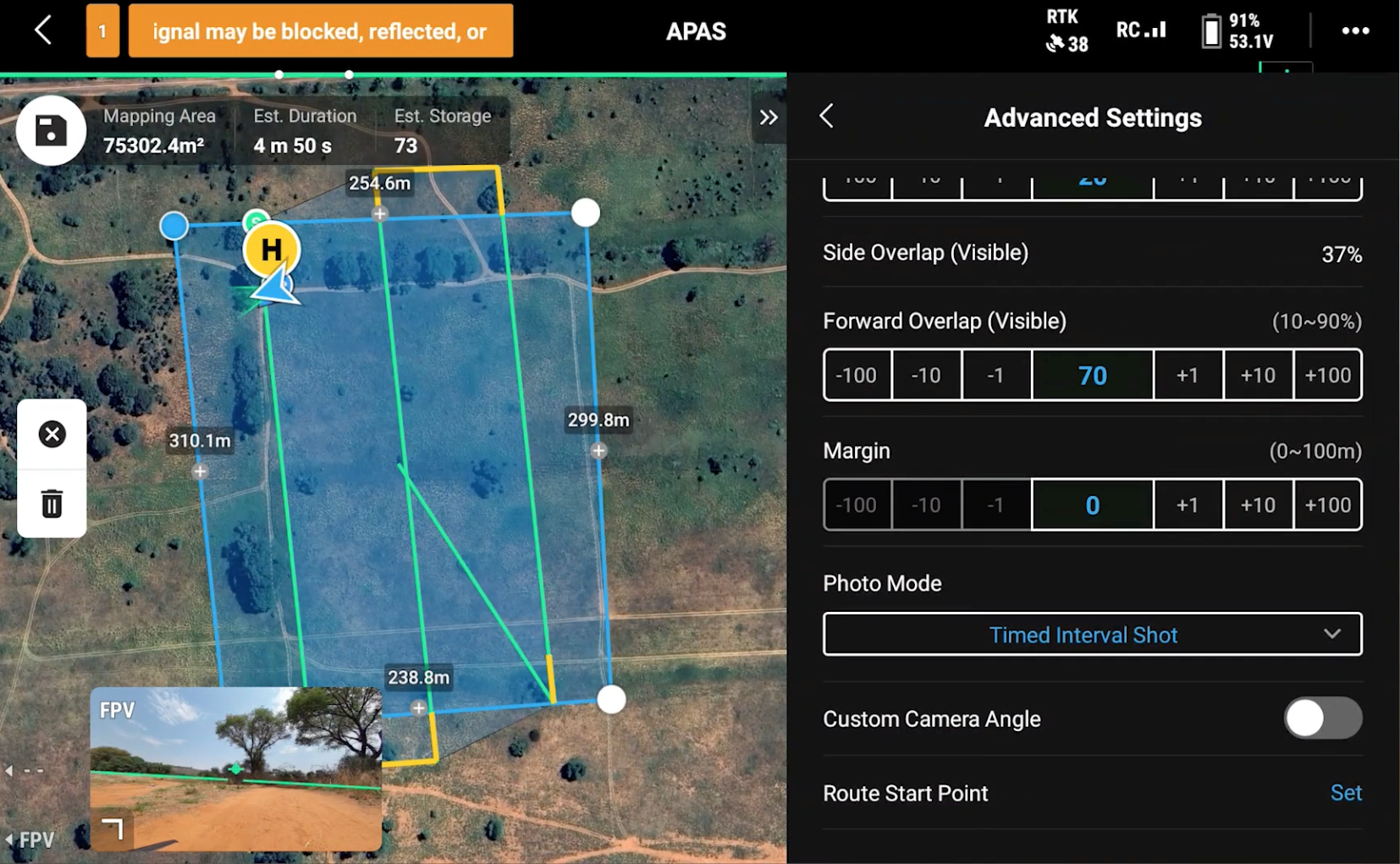
Dále nastavíme rozšiřující vlastnosti jako je:
- Side Overlap (LiDAR) - Boční překrytí: Doporučená hodnota je více než 20 %. Při složitějším terénu nebo potřebě vyšší hustoty mračna bodů se doporučuje hodnotu zvýšit.
- Forward Overlap (Viditelné/Fotogrammetrie): Při mapování se doporučuje použít výchozí parametry pro fotogrammetrické úlohy, přičemž je často vhodné vypnout funkci Dewarping (deformace).
Následně uložit misi a spustit let.